



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
| ||||||
Design for discipline of digital circuits graduation of Computer Science.UniFBV - Brazil.
On the computer you must have a gcode file (can be created with inkspace), use de processing code (uses JVM) for upload the gcode file to the arduino by a serial communication.
It pauses the upload for each line on the gcode and continues when it recives a confirmation that the line was executed by the arduino.
Uses a LCD screen to show the percentage of the drawing that is done, to make so the processing code before send the proper gcode calculate how many lines that is executable the gcode has and it sends to the arduino making it know the percentage of conclusion by dividing the amount of lines executed and the total lines recived.
The process can be paused by pressing the X key on the keyboard and resume the print with C.
All codes can be reused with oder step motors sizes that can be configured on the.ino cnc file.
Thanks to Tomas Barthalot and Surajit Majumdar.
#include <Servo.h>
#include <Stepper.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#define LINE_BUFFER_LENGTH 512
LiquidCrystal_I2C lcd(0x3f, 2, 1, 0, 4, 5, 6, 7, 3, POSITIVE);
float total = 1.0;
String lcdText = "";
String percentText = "";
float cont = 0.0;
float percent = 0.0;
// Servo position for Up and Down
const int penZUp = 30;
const int penZDown = 120;
// Servo on PWM pin 8
const int penServoPin = 8;
const int stepsPerRevolution = 20;
Servo penServo;
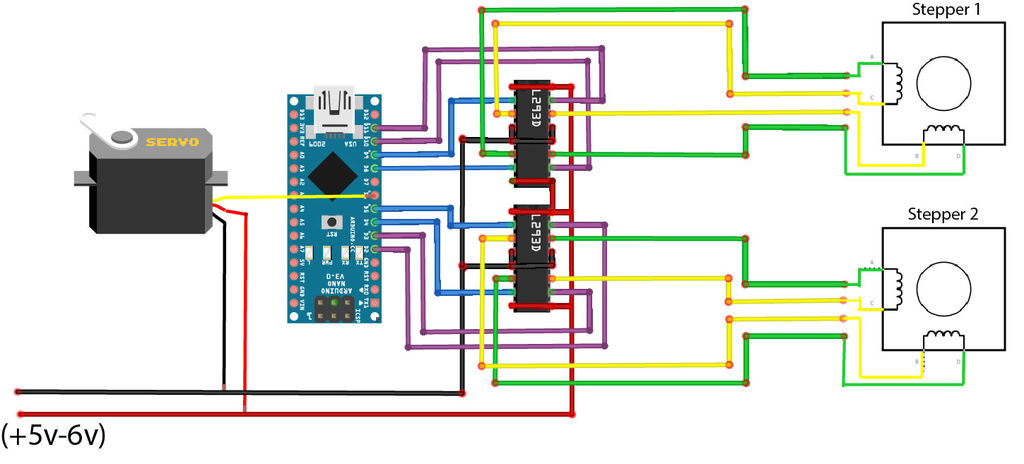
// Initialize steppers for X- and Y-axis using this Arduino pins for the L293D H-bridge
Stepper myStepperY(stepsPerRevolution, 9,12,10,13);
Stepper myStepperX(stepsPerRevolution, 7,4,3,6);
struct point {
float x;
float y;
float z;
};
// Current position of plothead
struct point actuatorPos;
// Drawing settings, should be OK
float StepInc = 1;
int StepDelay = 0;
int LineDelay = 50;
int penDelay = 50;
// Calculate steps per mm. Enter here.
float StepsPerMillimeterX = 8.0;
float StepsPerMillimeterY = 8.0;
// Drawing robot limits, in mm
float Xmin = 0;
float Xmax = 22;
float Ymin = 0;
float Ymax = 22;
float Zmin = 0;
float Zmax = 1;
float Xpos = Xmin;
float Ypos = Ymin;
float Zpos = Zmax;
// Set to true to get debug output.
boolean verbose = true;
// Needs to interpret
// G1 for moving
// G4 P300 (wait 150ms)
// M300 S30 (pen down)
// M300 S50 (pen up)
// Discard anything with a (
// Discard any other command!
/**********************
* void setup() - Initialisations
***********************/
void setup() {
// Setup
Serial.begin( 9600 );
lcd.begin (16,2);
lcd.setBacklight(HIGH);
penServo.attach(penServoPin);
penServo.write(penZUp);
delay(200);
// Decrease if necessary
myStepperX.setSpeed(300);
myStepperY.setSpeed(300);
// Set & move to initial default position
// TBD
// Notifications!!!
Serial.println("Ready to print");
lcd.clear();
lcd.setCursor(0,0);
lcd.print("Ready to print");
}
void loop()
{
delay(200);
char line[ LINE_BUFFER_LENGTH ];
char c;
int lineIndex;
bool lineIsComment, lineSemiColon;
lineIndex = 0;
lineSemiColon = false;
lineIsComment = false;
while (1) {
// Serial reception
while ( Serial.available()>0 ) {
c = Serial.read();
if (( c == '\n') || (c == '\r') ) {
if ( lineIndex > 0 ) {
line[ lineIndex ] = '\0';
if (verbose) {
Serial.print( "Received : ");
Serial.println( line );
}
processIncomingLine( line, lineIndex );
lineIndex = 0;
}
lineIsComment = false;
lineSemiColon = false;
Serial.println("ok");
}
else {
if ( (lineIsComment) || (lineSemiColon) ) {
if ( c == ')' ) lineIsComment = false;
}
else {
if ( c == '(' ) {
lineIsComment = true;
}
else if ( c == ';' ) {
lineSemiColon = true;
}
else if ( lineIndex >= LINE_BUFFER_LENGTH-1 ) {
Serial.println( "ERROR - lineBuffer overflow" );
lineIsComment = false;
lineSemiColon = false;
}
else if ( c >= 'a' && c <= 'z' ) {
line[ lineIndex++ ] = c-'a'+'A';
}
else {
line[ lineIndex++ ] = c;
}
}
}
}
}
}
void processIncomingLine( char* line, int charNB ) {
int currentIndex = 0;
char buffer[ 64 ];
struct point newPos;
newPos.x = 0.0;
newPos.y = 0.0;
// G1 for moving
// G1 X60 Y30
// G1 X30 Y50
// M300 S30 (pen down)
// M300 S50 (pen up)
while( currentIndex < charNB ) {
switch ( line[ currentIndex++ ] ) {
case 'G':
buffer[0] = line[ currentIndex++ ];
// buffer[1] = line[ currentIndex++ ];
// buffer[2] = '\0';
buffer[1] = '\0';
switch ( atoi( buffer ) ){
case 0:
case 1:
char* indexX = strchr( line+currentIndex, 'X' );
char* indexY = strchr( line+currentIndex, 'Y' );
if ( indexY <= 0 ) {
newPos.x = atof( indexX + 1);
newPos.y = actuatorPos.y;
}
else if ( indexX <= 0 ) {
newPos.y = atof( indexY + 1);
newPos.x = actuatorPos.x;
}
else {
newPos.y = atof( indexY + 1);
indexY = '\0';
newPos.x = atof( indexX + 1);
}
drawLine(newPos.x, newPos.y );
actuatorPos.x = newPos.x;
actuatorPos.y = newPos.y;
break;
}
cont++;
lcdPrint();
break;
case 'M':
buffer[0] = line[ currentIndex++ ];
buffer[1] = line[ currentIndex++ ];
buffer[2] = line[ currentIndex++ ];
buffer[3] = '\0';
switch ( atoi( buffer ) ){
case 300:
{
char* indexS = strchr( line+currentIndex, 'S' );
float Spos = atof( indexS + 1);
if (Spos == 30) {
penDown();
}
if (Spos == 50) {
penUp();
}
break;
}
case 114:
Serial.print( "Absolute position : X = " );
Serial.print( actuatorPos.x );
Serial.print( " - Y = " );
Serial.println( actuatorPos.y );
break;
default:
Serial.print( "Command not recognized : M");
Serial.println( buffer );
}
cont++;
lcdPrint();
break;
case 'C':
Serial.println("flag");
buffer[0] = line[ currentIndex++ ];
buffer[1] = line[ currentIndex++ ];
buffer[2] = line[ currentIndex++ ];
buffer[3] = line[ currentIndex++ ];
buffer[4] = '\0';
total = atoi(buffer);
break;
}
}
}
/*********************************
* Draw a line from (x0;y0) to (x1;y1).
* Bresenham algo from https://www.marginallyclever.com/blog/2013/08/how-to-build-an-2-axis-arduino-cnc-gcode-interpreter/
**********************************/
void drawLine(float x1, float y1) {
if (verbose)
{
Serial.print("fx1, fy1: ");
Serial.print(x1);
Serial.print(",");
Serial.print(y1);
Serial.println("");
}
// Bring instructions within limits
if (x1 >= Xmax) {
x1 = Xmax;
}
if (x1 <= Xmin) {
x1 = Xmin;
}
if (y1 >= Ymax) {
y1 = Ymax;
}
if (y1 <= Ymin) {
y1 = Ymin;
}
if (verbose)
{
Serial.print("Xpos, Ypos: ");
Serial.print(Xpos);
Serial.print(",");
Serial.print(Ypos);
Serial.println("");
}
if (verbose)
{
Serial.print("x1, y1: ");
Serial.print(x1);
Serial.print(",");
Serial.print(y1);
Serial.println("");
}
// Convert coordinates to steps
x1 = (int)(x1*StepsPerMillimeterX);
y1 = (int)(y1*StepsPerMillimeterY);
float x0 = Xpos;
float y0 = Ypos;
// Let's find out the change for the coordinates
long dx = abs(x1-x0);
long dy = abs(y1-y0);
int sx = x0<x1 ? StepInc : -StepInc;
int sy = y0<y1 ? StepInc : -StepInc;
long i;
long over = 0;
if (dx > dy) {
for (i=0; i<dx; ++i) {
myStepperX.step(sx);
over+=dy;
if (over>=dx) {
over-=dx;
myStepperY.step(sy);
}
delay(StepDelay);
}
}
else {
for (i=0; i<dy; ++i) {
myStepperY.step(sy);
over+=dx;
if (over>=dy) {
over-=dy;
myStepperX.step(sx);
}
delay(StepDelay);
}
}
if (verbose)
{
Serial.print("dx, dy:");
Serial.print(dx);
Serial.print(",");
Serial.print(dy);
Serial.println("");
}
if (verbose)
{
Serial.print("Going to (");
Serial.print(x0);
Serial.print(",");
Serial.print(y0);
Serial.println(")");
}
// Delay before any next lines are submitted
delay(LineDelay);
// Update the positions
Xpos = x1;
Ypos = y1;
}
// Raises pen
void penUp() {
penServo.write(penZUp);
delay(LineDelay);
Zpos=Zmax;
if (verbose) {
Serial.println("Pen up!");
}
}
// Lowers pen
void penDown() {
penServo.write(penZDown);
delay(LineDelay);
Zpos=Zmin;
if (verbose) {
Serial.println("Pen down.");
}
}
void lcdPrint(){
percent = (cont/total)*100;
if(percent<10){
percentText = "0"+String((int)percent)+"%";
}else{
percentText = String((int)percent)+"%";
}
if(!lcdText.equals(percentText)){
lcdText = percentText;
lcd.clear();
lcd.setCursor(0,0);
lcd.print(lcdText);
}
if(lcdText.equals("100%")){
cont = 0;
lcdText = "Finish";
lcd.clear();
lcd.setCursor(0,0);
lcd.print(lcdText);
}
Serial.println(percentText);
}
import java.awt.event.KeyEvent;
import javax.swing.JOptionPane;
import processing.serial.*;
Serial port = null;
String portname = null;
boolean streaming = false;
float speed = 0.001;
String[] gcode;
int i = 0;
void openSerialPort()
{
if (portname == null) return;
if (port != null) port.stop();
port = new Serial(this, portname, 9600);
port.bufferUntil('\n');
}
void selectSerialPort()
{
String result = (String) JOptionPane.showInputDialog(frame,
"Select the serial port that corresponds to your Arduino board.",
"Select serial port",
JOptionPane.QUESTION_MESSAGE,
null,
Serial.list(),
0);
if (result != null) {
portname = result;
openSerialPort();
}
}
void setup()
{
size(300, 100);
openSerialPort();
}
void draw()
{
background(155);
fill(0);
int y = 24, dy = 12;
text("p: select serial port", 12, y); y += dy;
text("g: stream a g-code file", 12, y); y += dy;
text("x: stop streaming g-code", 12, y); y += dy;
text("c: resume streaming g-code", 12, y); y += dy;
text("current serial port: " + portname, 12, y); y -= dy;
}
void keyPressed()
{
if (!streaming) {
if (key == 'p') selectSerialPort();
if (key == 'g') {
gcode = null; i = 0;
File file = null;
println("Loading file...");
selectInput("Select a file to process:", "fileSelected", file);
}
}
if (key == 'x') streaming = false;
if (key == 'c') streaming = true; stream();
}
void fileSelected(File selection) {
if (selection == null) {
println("Window was closed or the user hit cancel.");
} else {
println("User selected " + selection.getAbsolutePath());
gcode = loadStrings(selection.getAbsolutePath());
if (gcode == null) return;
streaming = true;
sendSize();
}
}
void sendSize(){
int total = 0;
for(String string : gcode){
if(string.length()>0){
if(string.charAt(0)=='G'||string.charAt(0)=='M'){
total++;
}
}
}
if(total<10){
port.write("C000"+total+'\n');
}else if(total<100){
port.write("C00"+total+'\n');
}else if(total<1000){
port.write("C0"+total+'\n');
}else if (total <10000){
port.write("C"+total+'\n');
}else {
port.write("C9999"+'\n');
}
stream();
}
void stream()
{
if (!streaming) return;
while (true) {
if (i == gcode.length) {
streaming = false;
return;
}
if (gcode[i].trim().length() == 0) i++;
else break;
}
println(gcode[i]);
port.write(gcode[i] + '\n');
i++;
}
void serialEvent(Serial p)
{
String s = p.readStringUntil('\n');
println(s.trim());
if (s.trim().startsWith("ok")) stream();
if (s.trim().startsWith("error")) stream(); // XXX: really?
}






{kind=link}
Comments