



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 | ||||
Software apps and online services | ||||||
| ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
| ||||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
- Simplify nearshore regatta for radio controlled boats, allowing to easily position up to 6 buoys
- Determine a regatta course according to the wind and the body of water
- Position buoys in full autonomy on the water to perform the regatta course
- The use of traditional buoys with an anchor requires a boat to launch the buoys and potentially damage seabed with the anchor
- Setting up a course takes about 30 minutes
- Modifying a course to take into account a change in wind direction also takes about 30 minutes
Sail Regatta like America's. Cup or Sail GP now use autonomous buoys. We decided to take up the challenge to build home made, cost effective, autonomous buoys adapted to radio controlled sail boat.
How does it work?Three steps for the installation of up to 6 autonomous buoys:1 – Definition of the route and identification of the GPS positions of each of the Buoys
The following dashboard running on a smartphone, tablet or computer allows to :
- send actions to all the buoys or to a specific buoy
- receive data from the buoys in real time to understand the state of each one
There is 5 Buoys as of today. The sixth is currently in the assembly phase.
2 – Communication with each buoy in LTE to give its TargetGPS position
3 – Autonomous movement of each buoy to position itself on its target GPS position and servo control to remain iton this GPS position
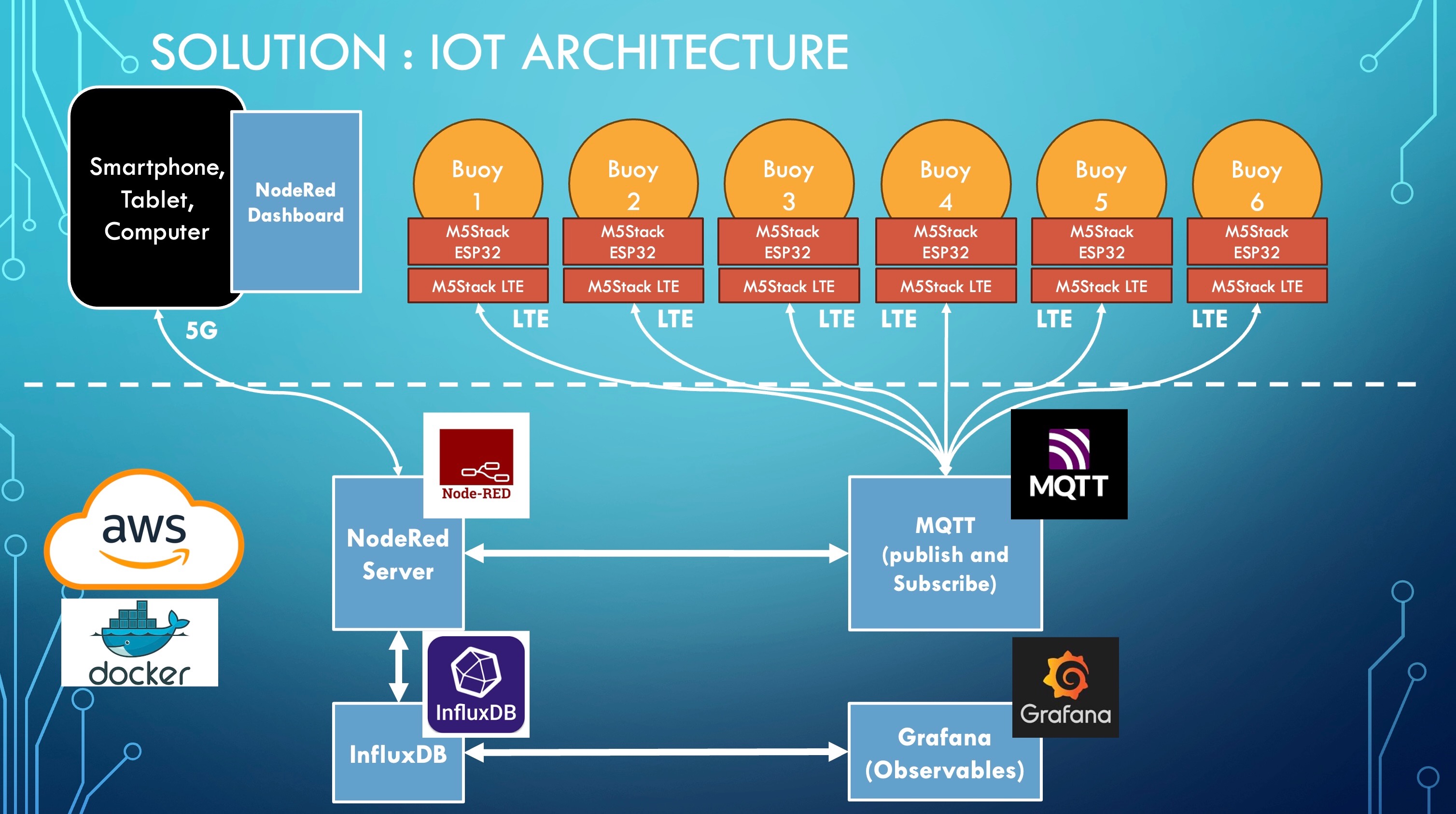
At the same time, monitoring of the behavior of each of the buoysHow does the system technically works?The system is composed of 3 parts:
1- Up to six autonomous buoys communicating in LTE (5G like communication)
2- A communication broker (MQTT) between the 6 buoys and the ground station, with publish and subscribe messages
3- A ground station in the form of a dashboard (smartphone, tablet, computer) connected to NodeRed hosted on Amazon Web Services
How does a Buoy technically works?A buoy is composed of multiple M5Stack components including an ESP32 (Core 2).Receiving of navigation commands
Sending Reports Back to the Ground Station
Autonomous mode management :
- Monitoring of the link with the ground station
- Sensor Configuration and Monitoring
- Determination of navigation modes and guidance
- In-position servo -Troubleshooting
A lot of possible implementation of the IoT open source software components (NodeRed, MQTT, InfluxDB, Grafana). We have chosen to implement them on AWS public cloud for robustness and ease of use, using docker. We do not need any routeur/small server on shore with the buoys that would require electrical power and water protection. The only thing required is a smartphone, a tablet or a computer with internet connection. The dashboard gets adapted to the size of the screen.
How does the ground station technically works with Node Red?Defining and visualizing the route on a map
Buoy implementation :
- Initialization
- Launch of buoy navigation
- Adaptation of the route (if necessary)
- Buoy Return Management
Visualization of the system status
How is a buoy modelled, printed and assembled in 3D?What are the limitations of our project?Today, our main limitation is the GNSS precision. We do need a high precision in the stability of the buoy, even more on the starting line.
With the GNSS module we are currently using, we have a 2 meters precision on x and y axis, even with Galiléo only constellation in Europe.
We know that some industries are using GNSS RTK modules to obtain a centimer precision, fo exemple for autonomous mower in gardens.
We are very keen to M5Stack components because they are very easy to use, especially for software engineer. We hope that M5Stack will have a GNSS RTK module in its catalog in a near future.











{kind=link}
Comments