#include <Servo.h>
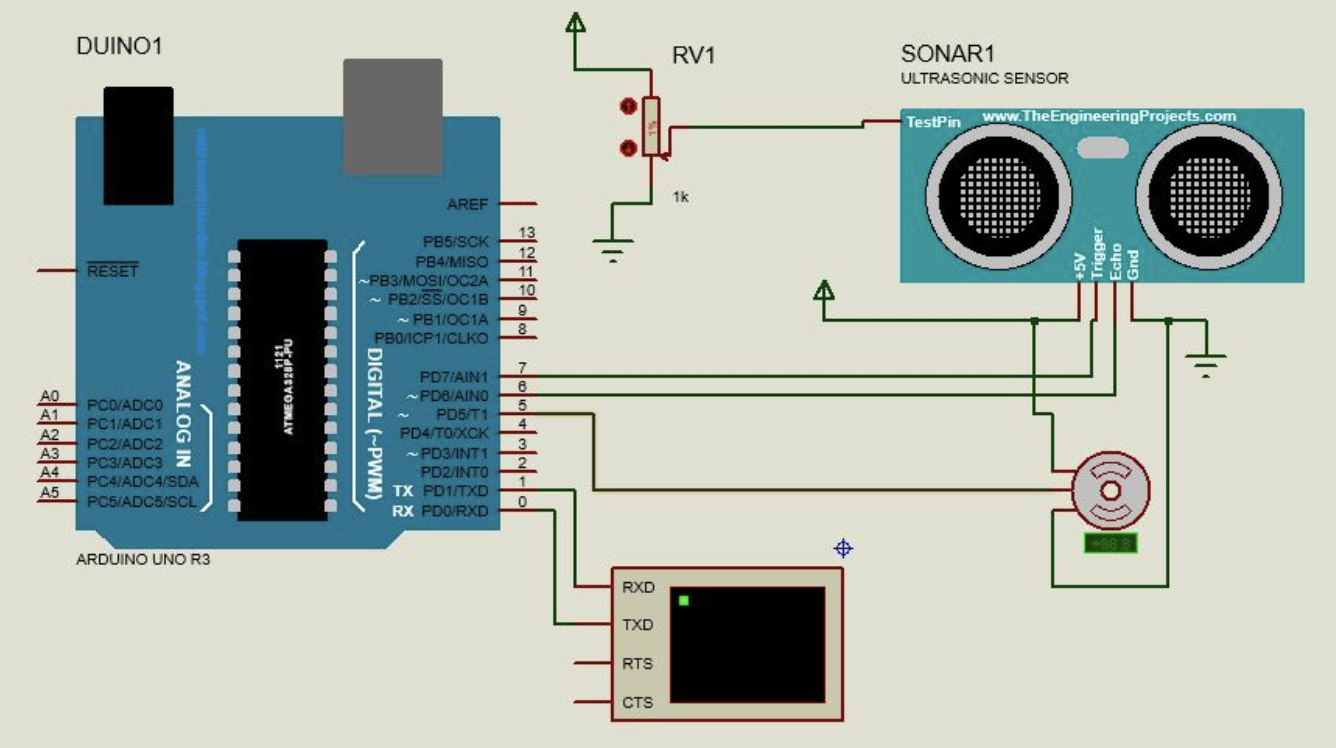
const int trigPin = 7; // Trigger Pin of Ultrasonic Sensor
const int echoPin = 6; // Echo Pin of Ultrasonic Sensor
Servo Myservo;
void setup()
{
Serial.begin(9600); // Starting Serial Terminal
Myservo.attach(5); // Signal Pin of Servo
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.print(" Distance ");
Serial.print(" Measurement ");
delay(1000);
delay(1000);
Serial.print("Made By :");
Serial.print(" OverAll Technical Gyan");
delay(2000);
}
void loop()
{
long duration, cm;
pinMode(trigPin, OUTPUT);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
cm = microsecondsToCentimeters(duration);
Serial.print("Distance:");
Serial.print(cm);
Serial.print("cm");
delay(100);
if(cm >= 20){
Myservo.write(0);
}
else {
Myservo.write(90);
}
Serial.println();
delay(100);
}
long microsecondsToCentimeters(long microseconds)
{
return microseconds / 29 / 2;
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}
{kind=link}
Comments