




Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 2 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
The purpose of the project is to detect the average amount of students within that enter the counselors office throughout the day. We chose this area of focus in order to determine when would be a good time for seniors to visit their counselors due to the larger amount of underclassmen which frequently occupy most of the counselors time.
Our final product did not change much from the first drawings we made. The only thing that really was changed over time was the size of the enclosure.
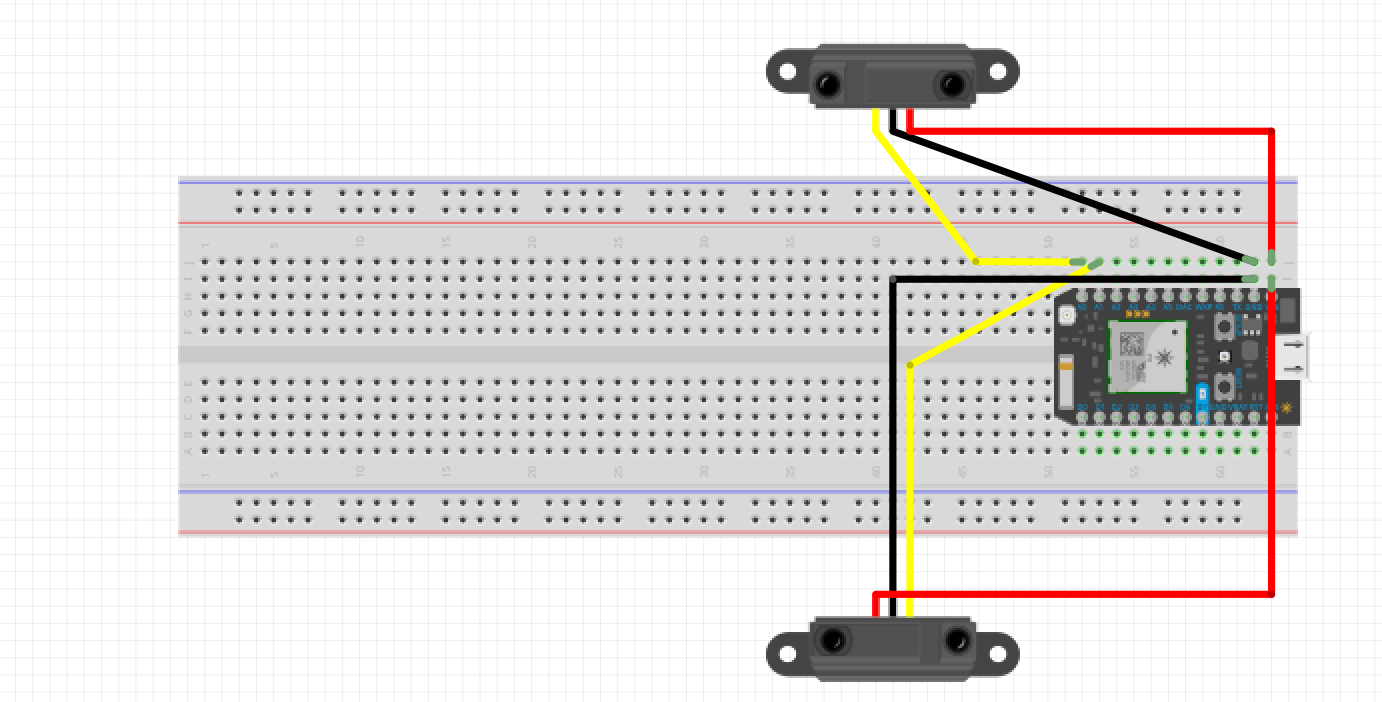
In order to make this happen we had to decide on what type of sensor we would need. We decided on an Infrared Proximity Sensor so we could determine if someone was passing the door using their distance from the sensor.
We developed our code by using the readings from the first sensor compared to the second sensor and seeing which one was covered. By doing this, we were able to determine when someone was leaving or entering the room whenever there was movement in front of the sensor. Then the code prints out the person's action along with a timestamp and total person count.
Our biggest challenge was the creation of the code as there was no API for the sensor and we had to rely on previous knowledge and programming experience. Another problem we had was finding a location to leave the sensor as it often, the sensors were being blocked by the trim of the office.
The most annoying aspect was cleaning up the code afterwards as there were many invalid data points that were recorded because people stood in from of the sensor for longer than 2 secs, something we did not expect. This was because there were times throughout the day where the line would get so long it would go out the door, causing people to block the sensors.
We kept the cardboard inside the final project as it was the best material we could use to hold the sensors in place and slightly bend to fit the walls of the enclosure.
With this project we learned that the best time to go to the office was either before or after school. Going during Lunch periods (although it seems the easiest) you run the risk of sitting in the waiting room for 15 - 20 mins just to get in with your Counselor. If you want to be the most productive, the best time is to go before or after. Also, a time where almost no one is there is between 1pm and 2pm. If you can go at the end of 6th period lunch or get a pass out of your class, there will be almost no wait time to get in with your counselor.
Overall, we think this project was a success. We had thought the office would be most busy before and after school as there was no restrictions to who could visit. It is now apparent that we were wrong and it seems people would rather sacrifice their Lunch to all cram into the office at once.




{kind=link}
Comments