


Software apps and online services | ||||||
 |
| |||||
| ||||||
Greetings everyone, and welcome to my article tutorial. Today, I'll guide you through the process of creating an Gesture Control Mouse.
Project Overview:
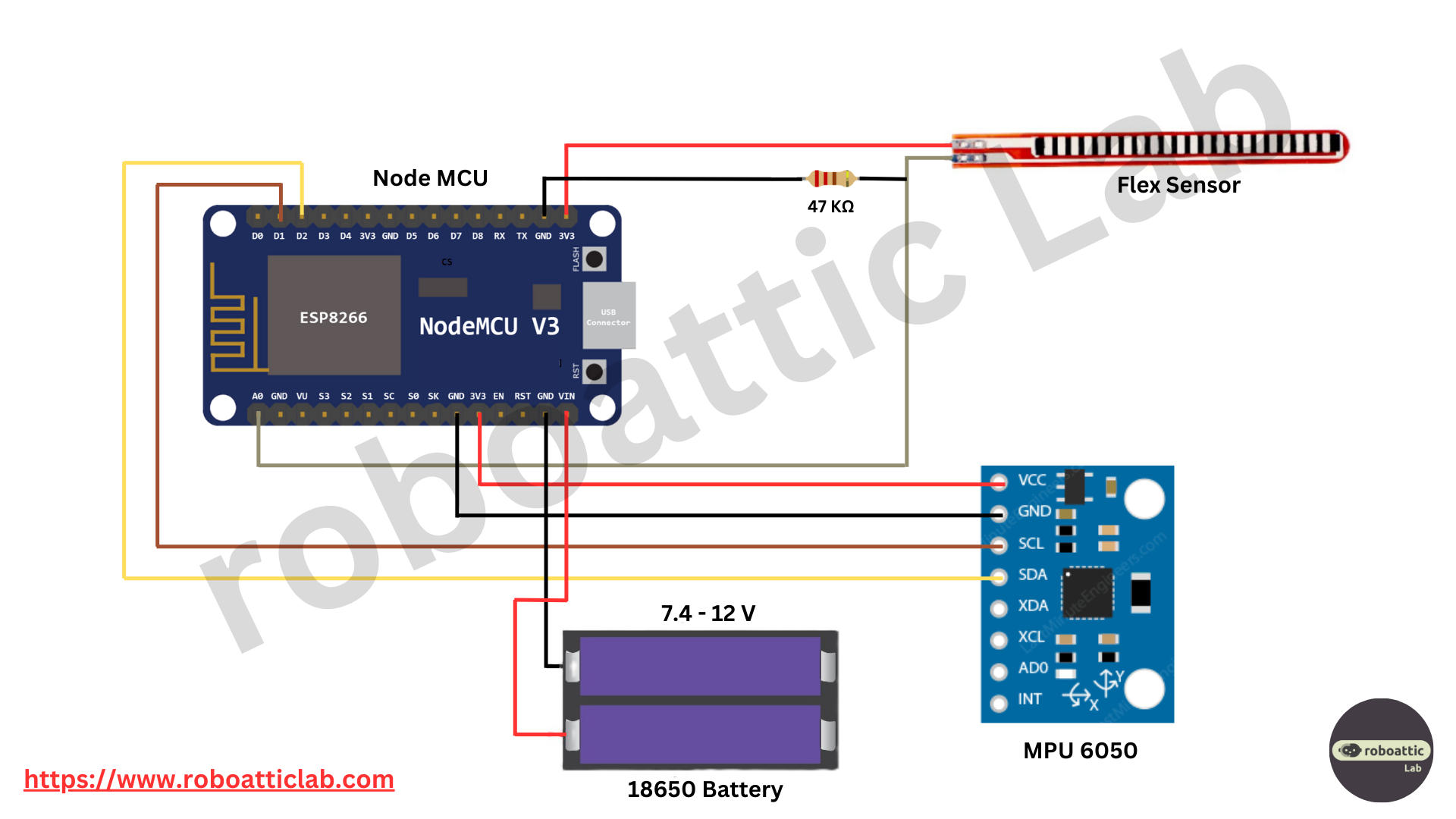
In this project, a gesture-controlled mouse is developed using a Node MCU, MPU 6050, and a flex/bend sensor. The MPU 6050, leveraging its gyro and accelerometer, moves the mouse pointer in all directions, while the bend sensor triggers a right-click when bent. Initially prototyped on a breadboard, the system is tested in scenarios like playing Asphalt 8 game and scrolling the roboattic Lab website. This innovative, sensor-based design is lightweight and runs efficiently on low-spec PCs, unlike camera-based gesture systems that require heavy computational resources, making it an ideal, accessible choice for college or school projects.
Before beginning a huge shoutout to JLCMC for sponsoring.
Now, let's get started with our project!
Electronic Components Required:
- Node MCU
- MPU 6050
- 47 KΩ
- Flex/Bend Sensor
- Breadboard
- Dotted PCB Board
Additional Tools:
- Soldering Iron
- Hot Glue
- Cutter
Software:
- Arduino IDE
- VS Code
What You Need to Do:
- First, gently pop the Node MCU and MPU 6050 onto the breadboard—don't worry, they fit in nicely!
- Next, connect the VCC and GND pins of the MPU 6050 to the 3.3V and ground pins on your Node MCU respectively.
- Then, hook up the communication lines: connect SDA to the Node MCU's D2 pin and SCL to its D1 pin. These connections are super important because they let the components “talk” to each other.
A Quick Tip:
Make sure you double-check every wire connection. Trust me, a loose wire can become a real headache later on!
Step 2: Installing Required LibrariesTo ensure smooth execution of your Python and Arduino code, install the necessary libraries as outlined below.
Python Libraries:
For Python, create a `requirements.txt` file with the following contents:
requests
numpy
pyautoguiThen, install all required packages using the following command in your terminal or command prompt:
pip install -r requirements.txtArduino Libraries:
For your .ino (Arduino) code, you need to install the following libraries:
1. ESP8266WiFiThis library allows the ESP8266 module to connect to Wi-Fi.
Installation Steps:
- Open Arduino IDE.
- Go to File > Preferences.
- In the "Additional Board Manager URLs" field, add:
http://arduino.esp8266.com/stable/package_esp8266com_index.json- Go to Tools > Board > Boards Manager.
- Search for ESP8266 and install the package ESP8266 by ESP8266 Community.
- This will also install the ESP8266WiFi library automatically.
Supports the MPU6050 accelerometer and gyroscope sensor.
Installation Steps:
- Open Arduino IDE.
- Go to Sketch > Include Library > Manage Libraries.
- In the Library Manager, search for Adafruit MPU6050.
- Click Install.
- For more details, visit the Adafruit MPU6050 GitHub repository.
Provides a unified sensor interface.
Installation Steps:
- Open Arduino IDE.
- Go to Sketch > Include Library > Manage Libraries.
- Search for Adafruit Unified Sensor.
- Click Install.
Okay, now it’s time to wake everything up with some basic code! Here’s what you do:
What You Need to Do:
- Open up your Arduino IDE and upload the basic code to your Node MCU.
#include <ESP8266WiFi.h>
#include <ESP8266WebServer.h>
#include <Wire.h>
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
// WiFi credentials
const char* ssid = "YourWiFiName"; // Replace with your WiFi network name
const char* password = "YourPassword"; // Replace with your WiFi password
ESP8266WebServer server(80);
Adafruit_MPU6050 mpu;
void setup() {
Serial.begin(115200);
Wire.begin(D2, D1); // SDA=D2, SCL=D1
// Initialize MPU6050
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
// Configure sensor settings
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
// Connect to WiFi
WiFi.begin(ssid, password);
Serial.print("Connecting to WiFi");
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.print("Connected to ");
Serial.println(ssid);
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
// Define server routes
server.on("/", handleRoot);
server.on("/data", handleData);
// Start server
server.begin();
Serial.println("HTTP server started");
}
void loop() {
server.handleClient();
}
void handleRoot() {
String html = "<!DOCTYPE html>\n";
html += "<html>\n";
html += "<head>\n";
html += "<title>MPU6050 Sensor Data</title>\n";
html += "</head>\n";
html += "<body>\n";
html += "<h1>MPU6050 Sensor Web Server</h1>\n";
html += "<p>Use the /data endpoint to get sensor readings in JSON format</p>\n";
html += "<p>Server IP: " + WiFi.localIP().toString() + "</p>\n";
html += "</body>\n";
html += "</html>\n";
server.send(200, "text/html", html);
}
void handleData() {
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
// Create JSON response
String json = "{";
json += "\"accelerometer\": {";
json += "\"x\": " + String(a.acceleration.x) + ", ";
json += "\"y\": " + String(a.acceleration.y) + ", ";
json += "\"z\": " + String(a.acceleration.z);
json += "}, ";
json += "\"gyroscope\": {";
json += "\"x\": " + String(g.gyro.x) + ", ";
json += "\"y\": " + String(g.gyro.y) + ", ";
json += "\"z\": " + String(g.gyro.z);
json += "}, ";
json += "\"temperature\": " + String(temp.temperature);
json += "}";
server.send(200, "application/json", json);
}- Once the code is uploaded, check the serial monitor. You should see a local server IP appear. That’s your magic number!
- Open up your VS Code and copy & paste this code:
import requests
import json
import time
from colorama import Fore, Style, init
init()
def fetch_data(ip_address):
try:
response = requests.get(f"http://{ip_address}/data", timeout=2)
if response.status_code == 200:
return json.loads(response.text)
else:
print(f"{Fore.RED}Error: Received status code {response.status_code}{Style.RESET_ALL}")
return None
except requests.exceptions.RequestException as e:
print(f"{Fore.RED}Error connecting to server: {e}{Style.RESET_ALL}")
return None
def print_data(data):
if data is None:
return
print("\033c", end="") # Clear the terminal screen
print(f"{Fore.CYAN}===== MPU6050 Sensor Data ====={Style.RESET_ALL}")
print(f"{Fore.GREEN}Acceleration (m/s²):{Style.RESET_ALL}")
print(f" X: {data['accel_x']:.4f}")
print(f" Y: {data['accel_y']:.4f}")
print(f" Z: {data['accel_z']:.4f}")
print(f"{Fore.GREEN}Gyroscope (rad/s):{Style.RESET_ALL}")
print(f" X: {data['gyro_x']:.4f}")
print(f" Y: {data['gyro_y']:.4f}")
print(f" Z: {data['gyro_z']:.4f}")
print(f"{Fore.YELLOW}Temperature: {data['temp']:.2f}°C{Style.RESET_ALL}")
print(f"{Fore.CYAN}============================={Style.RESET_ALL}")
def main():
# Ask for the NodeMCU IP address
ip_address = input("Enter the NodeMCU IP address: ")
print(f"Connecting to NodeMCU at {ip_address}...")
print("Press Ctrl+C to stop")
try:
while True:
data = fetch_data(ip_address)
print_data(data)
time.sleep(0.1)
except KeyboardInterrupt:
print("\nExiting program")
if __name__ == "__main__":
main()- Now, take that IP address and paste it into your Python code in VS Code. Hit the run button, and boom—you should see the MPU 6050’s gyro and accelerometer data streaming in your terminal.
JLCMC is your one-stop shop for all electronic manufacturing needs, offering an extensive catalog of nearly 600, 000 SKUs that cover hardware, mechanical, electronic, and automation components. Their commitment to guaranteeing genuine products, rapid shipping (with most in-stock items dispatched within 24 hours), and competitive pricing truly sets them apart. In addition, their exceptional customer service ensures you always get exactly what you need to bring your projects to life.
To show their support for our community, JLCMC is offering an exclusive $19 discount coupon. This is the perfect opportunity to save on high-quality components for your next project. Don’t miss out—visit https://jlcmc.com/?from=RBL to explore their amazing range of products and grab your discount coupon today!
Step 5: Let’s Make the Mouse Cursor MoveAlright, now for the really fun part—moving the cursor with your hand! Here’s what you need to do:
- First, update your Node MCU code and upload it.
#include <ESP8266WiFi.h>
#include <ESP8266WebServer.h>
#include <Wire.h>
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
// WiFi credentials
const char* ssid = "YourWiFiName"; // Replace with your WiFi network name
const char* password = "YourPassword"; // Replace with your WiFi password
// Use static IP to prevent IP address changes
IPAddress staticIP(192, 168, 31, 212); // The IP you want to assign to NodeMCU
IPAddress gateway(192, 168, 31, 1); // Your router's IP address (typical gateway)
IPAddress subnet(255, 255, 255, 0); // Subnet mask
IPAddress dns(8, 8, 8, 8); // DNS (Google's DNS)
ESP8266WebServer server(80);
Adafruit_MPU6050 mpu;
void setup() {
Serial.begin(115200);
delay(100); // Short delay for serial to initialize
Serial.println("\n\nMPU6050 Web Server Starting...");
// Initialize I2C for MPU6050
Wire.begin(D2, D1); // SDA=D2, SCL=D1
// Initialize MPU6050
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
Serial.println("Please check your wiring!");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
// Configure sensor settings
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
// Configure WiFi in station mode with static IP
WiFi.mode(WIFI_STA);
WiFi.config(staticIP, gateway, subnet, dns); // Set static IP
WiFi.begin(ssid, password);
Serial.println("Connecting to WiFi...");
// Wait for connection with timeout
int timeout = 0;
while (WiFi.status() != WL_CONNECTED && timeout < 20) {
delay(500);
Serial.print(".");
timeout++;
}
if (WiFi.status() != WL_CONNECTED) {
Serial.println("\nFailed to connect to WiFi! Check credentials and try again.");
while(1) {
delay(1000);
}
}
Serial.println("");
Serial.print("Connected to WiFi network: ");
Serial.println(ssid);
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
// Define server routes
server.on("/", HTTP_GET, handleRoot);
server.on("/data", HTTP_GET, handleData);
server.onNotFound(handleNotFound);
// Start server
server.begin();
Serial.println("HTTP server started");
Serial.println("Web interface available at http://" + WiFi.localIP().toString());
Serial.println("Data endpoint available at http://" + WiFi.localIP().toString() + "/data");
}
void loop() {
server.handleClient();
delay(2); // Small delay to improve stability
}
void handleRoot() {
String html = "<!DOCTYPE html>\n";
html += "<html>\n";
html += "<head>\n";
html += "<title>MPU6050 Sensor Data</title>\n";
html += "<meta http-equiv='refresh' content='5'>\n"; // Auto-refresh page every 5 seconds
html += "<style>\n";
html += "body { font-family: Arial, sans-serif; margin: 20px; }\n";
html += "h1 { color: #0066cc; }\n";
html += "p { margin: 10px 0; }\n";
html += ".data { font-family: monospace; background-color: #f0f0f0; padding: 10px; border-radius: 5px; }\n";
html += "</style>\n";
html += "</head>\n";
html += "<body>\n";
html += "<h1>MPU6050 Sensor Web Server</h1>\n";
html += "<p>Server is running successfully!</p>\n";
html += "<p>Server IP: <strong>" + WiFi.localIP().toString() + "</strong></p>\n";
html += "<p>Get raw data at: <a href='/data'>/data</a> (JSON format)</p>\n";
// Get current sensor data
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
html += "<div class='data'>\n";
html += "<h2>Current Sensor Data:</h2>\n";
html += "<p>Accelerometer (m/s²):<br>\n";
html += "X: " + String(a.acceleration.x) + "<br>\n";
html += "Y: " + String(a.acceleration.y) + "<br>\n";
html += "Z: " + String(a.acceleration.z) + "</p>\n";
html += "<p>Gyroscope (rad/s):<br>\n";
html += "X: " + String(g.gyro.x) + "<br>\n";
html += "Y: " + String(g.gyro.y) + "<br>\n";
html += "Z: " + String(g.gyro.z) + "</p>\n";
html += "<p>Temperature: " + String(temp.temperature) + " °C</p>\n";
html += "</div>\n";
html += "</body>\n";
html += "</html>\n";
server.send(200, "text/html", html);
}
void handleData() {
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
// Enable CORS to allow requests from any origin
server.sendHeader("Access-Control-Allow-Origin", "*");
server.sendHeader("Access-Control-Allow-Methods", "GET");
server.sendHeader("Access-Control-Max-Age", "10000");
server.sendHeader("Access-Control-Allow-Headers", "Content-Type");
// Create JSON response
String json = "{";
json += "\"accelerometer\": {";
json += "\"x\": " + String(a.acceleration.x) + ", ";
json += "\"y\": " + String(a.acceleration.y) + ", ";
json += "\"z\": " + String(a.acceleration.z);
json += "}, ";
json += "\"gyroscope\": {";
json += "\"x\": " + String(g.gyro.x) + ", ";
json += "\"y\": " + String(g.gyro.y) + ", ";
json += "\"z\": " + String(g.gyro.z);
json += "}, ";
json += "\"temperature\": " + String(temp.temperature);
json += "}";
server.send(200, "application/json", json);
}
void handleNotFound() {
String message = "File Not Found\n\n";
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET) ? "GET" : "POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
for (uint8_t i = 0; i < server.args(); i++) {
message += " " + server.argName(i) + ": " + server.arg(i) + "\n";
}
server.send(404, "text/plain", message);
}- Open up your VS Code and copy & paste this code. We’re using pyautogui here to map the MPU 6050’s gyro data directly to your cursor movement. Basically, when you tilt the sensor left, the cursor moves left, and when you tilt right, it follows along.
import requests
import json
import time
import numpy as np
import pyautogui
import math
from collections import deque
import threading
import tkinter as tk
from tkinter import ttk
# Configuration
NODEMCU_IP = '192.168.XX.XXX' # Your NodeMCU IP
DATA_URL = f'http://{NODEMCU_IP}/data'
CONNECTION_TIMEOUT = 3 # Increase timeout to 3 seconds
MAX_RETRIES = 5 # Maximum number of retries on connection failure
# Settings for mouse control
MOUSE_SENSITIVITY_X = 50.0 # Higher value = less sensitive
MOUSE_SENSITIVITY_Y = 50.0
GYRO_THRESHOLD = 0.05 # Minimum gyro movement to register (eliminates jitter)
SCREEN_WIDTH, SCREEN_HEIGHT = pyautogui.size()
SMOOTHING_WINDOW = 5 # Number of samples for smoothing
# For click detection
CLICK_THRESHOLD = 2.0 # Threshold for click detection (acceleration magnitude)
CLICK_COOLDOWN = 1.0 # Seconds between clicks to avoid accidental double-clicks
# For safety (prevent mouse from going crazy)
pyautogui.FAILSAFE = True # Move mouse to corner to abort
# For UI
UPDATE_INTERVAL = 50 # milliseconds
# Global variables
last_click_time = 0
is_paused = False
is_running = True
show_debug = True
baseline_accel = {"x": 0, "y": 0, "z": 0}
baseline_gyro = {"x": 0, "y": 0, "z": 0}
calibration_samples = 20
mouse_pos = {"x": SCREEN_WIDTH // 2, "y": SCREEN_HEIGHT // 2}
# Smoothing buffers
accel_history = {"x": deque(maxlen=SMOOTHING_WINDOW),
"y": deque(maxlen=SMOOTHING_WINDOW),
"z": deque(maxlen=SMOOTHING_WINDOW)}
gyro_history = {"x": deque(maxlen=SMOOTHING_WINDOW),
"y": deque(maxlen=SMOOTHING_WINDOW),
"z": deque(maxlen=SMOOTHING_WINDOW)}
# Create UI
root = tk.Tk()
root.title("Gesture Mouse Control")
root.geometry("600x400")
root.protocol("WM_DELETE_WINDOW", lambda: set_running(False))
def set_running(state):
global is_running
is_running = state
if not state:
root.destroy()
def toggle_pause():
global is_paused
is_paused = not is_paused
pause_btn.config(text="Resume" if is_paused else "Pause")
status_var.set("PAUSED" if is_paused else "RUNNING")
def toggle_debug():
global show_debug
show_debug = not show_debug
debug_btn.config(text="Hide Debug" if show_debug else "Show Debug")
def start_calibration():
global baseline_accel, baseline_gyro
status_var.set("Calibrating... Don't move the sensor!")
root.update()
# Reset baselines
baseline_accel = {"x": 0, "y": 0, "z": 0}
baseline_gyro = {"x": 0, "y": 0, "z": 0}
# Collect samples
accel_samples = {"x": [], "y": [], "z": []}
gyro_samples = {"x": [], "y": [], "z": []}
for _ in range(calibration_samples):
data = fetch_data()
if data:
for axis in ["x", "y", "z"]:
accel_samples[axis].append(data["accelerometer"][axis])
gyro_samples[axis].append(data["gyroscope"][axis])
time.sleep(0.1)
# Calculate averages
for axis in ["x", "y", "z"]:
if accel_samples[axis]: # Check if we got samples
baseline_accel[axis] = sum(accel_samples[axis]) / len(accel_samples[axis])
baseline_gyro[axis] = sum(gyro_samples[axis]) / len(gyro_samples[axis])
status_var.set("Calibration complete")
sensitivity_x_var.set(MOUSE_SENSITIVITY_X)
sensitivity_y_var.set(MOUSE_SENSITIVITY_Y)
# Reset position to center
global mouse_pos
mouse_pos = {"x": SCREEN_WIDTH // 2, "y": SCREEN_HEIGHT // 2}
pyautogui.moveTo(mouse_pos["x"], mouse_pos["y"])
def update_sensitivity():
global MOUSE_SENSITIVITY_X, MOUSE_SENSITIVITY_Y
try:
MOUSE_SENSITIVITY_X = float(sensitivity_x_var.get())
MOUSE_SENSITIVITY_Y = float(sensitivity_y_var.get())
except ValueError:
pass # Ignore invalid inputs
def fetch_data():
"""Fetch data from NodeMCU with retries"""
for attempt in range(MAX_RETRIES):
try:
response = requests.get(DATA_URL, timeout=CONNECTION_TIMEOUT)
if response.status_code == 200:
status_var.set("Connected")
return json.loads(response.text)
else:
status_var.set(f"Error: Server returned {response.status_code}")
time.sleep(0.5)
except requests.exceptions.RequestException as e:
status_var.set(f"Connection error: {type(e).__name__}")
time.sleep(0.5)
return None
def smooth_data(data, history_buffer):
"""Apply smoothing to sensor data"""
history_buffer.append(data)
return sum(history_buffer) / len(history_buffer)
def detect_click(accel_data):
"""Detect a click gesture based on acceleration"""
global last_click_time
current_time = time.time()
# Calculate acceleration magnitude
accel_mag = math.sqrt(accel_data["x"]**2 + accel_data["y"]**2 + accel_data["z"]**2)
# Check if it exceeds threshold and enough time has passed since last click
if accel_mag > CLICK_THRESHOLD and current_time - last_click_time > CLICK_COOLDOWN:
last_click_time = current_time
return True
return False
def process_sensor_data(data):
"""Process sensor data and control mouse"""
global mouse_pos
if not data or is_paused:
return
# Get accelerometer and gyroscope data
accel = data["accelerometer"]
gyro = data["gyroscope"]
# Apply calibration
calibrated_accel = {
"x": accel["x"] - baseline_accel["x"],
"y": accel["y"] - baseline_accel["y"],
"z": accel["z"] - baseline_accel["z"]
}
calibrated_gyro = {
"x": gyro["x"] - baseline_gyro["x"],
"y": gyro["y"] - baseline_gyro["y"],
"z": gyro["z"] - baseline_gyro["z"]
}
# Apply smoothing
for axis in ["x", "y", "z"]:
calibrated_accel[axis] = smooth_data(calibrated_accel[axis], accel_history[axis])
calibrated_gyro[axis] = smooth_data(calibrated_gyro[axis], gyro_history[axis])
# Calculate mouse movement - using gyro for more precise control
# Invert axes as needed based on sensor orientation
dx = -calibrated_gyro["y"] if abs(calibrated_gyro["y"]) > GYRO_THRESHOLD else 0
dy = calibrated_gyro["x"] if abs(calibrated_gyro["x"]) > GYRO_THRESHOLD else 0
# Scale the movement
dx = dx * (SCREEN_WIDTH / MOUSE_SENSITIVITY_X)
dy = dy * (SCREEN_HEIGHT / MOUSE_SENSITIVITY_Y)
# Update position
mouse_pos["x"] += dx
mouse_pos["y"] += dy
# Constrain to screen boundaries
mouse_pos["x"] = max(0, min(SCREEN_WIDTH - 1, mouse_pos["x"]))
mouse_pos["y"] = max(0, min(SCREEN_HEIGHT - 1, mouse_pos["y"]))
# Move the mouse
pyautogui.moveTo(mouse_pos["x"], mouse_pos["y"])
# Check for click gesture
if detect_click(calibrated_accel):
pyautogui.click()
click_label.config(text="CLICK!")
root.after(500, lambda: click_label.config(text=""))
# Update UI
if show_debug:
accel_label.config(text=f"Accel: X: {calibrated_accel['x']:.2f}, Y: {calibrated_accel['y']:.2f}, Z: {calibrated_accel['z']:.2f}")
gyro_label.config(text=f"Gyro: X: {calibrated_gyro['x']:.2f}, Y: {calibrated_gyro['y']:.2f}, Z: {calibrated_gyro['z']:.2f}")
mouse_label.config(text=f"Mouse: X: {mouse_pos['x']:.0f}, Y: {mouse_pos['y']:.0f}")
def update_ui():
"""Update UI and process data periodically"""
if is_running:
data = fetch_data()
if data:
process_sensor_data(data)
root.after(UPDATE_INTERVAL, update_ui)
# Create UI elements
frame = ttk.Frame(root, padding="10")
frame.pack(fill=tk.BOTH, expand=True)
# Status
status_frame = ttk.LabelFrame(frame, text="Status")
status_frame.pack(fill=tk.X, expand=True, pady=5)
status_var = tk.StringVar(value="Initializing...")
status_label = ttk.Label(status_frame, textvariable=status_var, font=("Arial", 12))
status_label.pack(pady=5)
click_label = ttk.Label(status_frame, text="", font=("Arial", 16, "bold"), foreground="red")
click_label.pack()
# Debug info
debug_frame = ttk.LabelFrame(frame, text="Sensor Data")
debug_frame.pack(fill=tk.X, expand=True, pady=5)
accel_label = ttk.Label(debug_frame, text="Accel: X: 0.00, Y: 0.00, Z: 0.00")
accel_label.pack(anchor=tk.W)
gyro_label = ttk.Label(debug_frame, text="Gyro: X: 0.00, Y: 0.00, Z: 0.00")
gyro_label.pack(anchor=tk.W)
mouse_label = ttk.Label(debug_frame, text="Mouse: X: 0, Y: 0")
mouse_label.pack(anchor=tk.W)
# Settings
settings_frame = ttk.LabelFrame(frame, text="Settings")
settings_frame.pack(fill=tk.X, expand=True, pady=5)
# X sensitivity
sensitivity_x_frame = ttk.Frame(settings_frame)
sensitivity_x_frame.pack(fill=tk.X, expand=True, pady=2)
ttk.Label(sensitivity_x_frame, text="X Sensitivity:").pack(side=tk.LEFT)
sensitivity_x_var = tk.StringVar(value=str(MOUSE_SENSITIVITY_X))
sensitivity_x_entry = ttk.Entry(sensitivity_x_frame, textvariable=sensitivity_x_var, width=8)
sensitivity_x_entry.pack(side=tk.LEFT, padx=5)
# Y sensitivity
sensitivity_y_frame = ttk.Frame(settings_frame)
sensitivity_y_frame.pack(fill=tk.X, expand=True, pady=2)
ttk.Label(sensitivity_y_frame, text="Y Sensitivity:").pack(side=tk.LEFT)
sensitivity_y_var = tk.StringVar(value=str(MOUSE_SENSITIVITY_Y))
sensitivity_y_entry = ttk.Entry(sensitivity_y_frame, textvariable=sensitivity_y_var, width=8)
sensitivity_y_entry.pack(side=tk.LEFT, padx=5)
# Apply button
ttk.Button(settings_frame, text="Apply Settings", command=update_sensitivity).pack(pady=5)
# Buttons
buttons_frame = ttk.Frame(frame)
buttons_frame.pack(fill=tk.X, expand=True, pady=10)
calibrate_btn = ttk.Button(buttons_frame, text="Calibrate", command=start_calibration)
calibrate_btn.pack(side=tk.LEFT, padx=5)
pause_btn = ttk.Button(buttons_frame, text="Pause", command=toggle_pause)
pause_btn.pack(side=tk.LEFT, padx=5)
debug_btn = ttk.Button(buttons_frame, text="Hide Debug", command=toggle_debug)
debug_btn.pack(side=tk.LEFT, padx=5)
ttk.Button(buttons_frame, text="Exit", command=lambda: set_running(False)).pack(side=tk.RIGHT, padx=5)
# Instructions
instructions = """
INSTRUCTIONS:
1. Click 'Calibrate' and keep the sensor still
2. Tilt to move cursor
3. Quick shake for mouse click
4. Adjust sensitivity if needed
"""
ttk.Label(frame, text=instructions, justify=tk.LEFT).pack(anchor=tk.W, pady=5)
# Start the data processing
root.after(1000, update_ui)
if __name__ == "__main__":
# Center mouse position at start
pyautogui.moveTo(SCREEN_WIDTH // 2, SCREEN_HEIGHT // 2)
# Start UI
root.mainloop()Run this code and see it in action!
Step 6: Setting Up the Flex Sensor for Right-Click ActionAlright, let’s get into the fun part—adding the ability to click with our setup! We’ve already got the MPU 6050 and Node MCU working together to move the cursor by tilting the breadboard (pretty cool, right?). Now, we’re bringing in a flex sensor to handle right-clicks.
Here’s what you need to do:
Powering the Flex Sensor:
- Connect the positive leg of the flex sensor to the 3.3V pin on the NodeMCU.
- This provides the necessary power for the sensor to function.
Connecting the Sensor Output:
- Attach the negative leg of the flex sensor to the A0 (analog) pin of the NodeMCU.
- Since the flex sensor provides analog data (a range of values depending on its bend), the A0 pin is ideal for reading these variations.
Adding a Resistor for Voltage Division:
- Place a 47K Ohm resistor between the negative leg of the flex sensor and GND (ground) of the NodeMCU.
- This forms a voltage divider, allowing the NodeMCU to correctly interpret the sensor’s changes.
Uploading the Code:
- Flash the provided Arduino code onto the Node MCU to enable it to process the sensor readings and send click signals to the computer.
#include <ESP8266WiFi.h>
#include <ESP8266WebServer.h>
#include <Wire.h>
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
// WiFi credentials
const char* ssid = "Wifi Name";
const char* password = "Password";
+
// Flex sensor setup
const int flexPin = A0; // NodeMCU analog pin A0
const float VCC = 3.3; // NodeMCU voltage (3.3V)
const float R_DIV = 47000.0; // 47K ohm resistor
const float flatResistance = 25000.0; // Resistance when flat
const float bendResistance = 100000.0; // Resistance at 90 deg
// Click detection variables
const float CLICK_MIN_ANGLE = 60.0; // Minimum angle to trigger a click
const float CLICK_MAX_ANGLE = 90.0; // Maximum angle to consider
const unsigned long CLICK_COOLDOWN = 700; // Milliseconds to wait before registering another click
boolean isClicked = false; // Current click state
boolean clickSent = false; // Whether a click was already sent for this bend
unsigned long lastClickTime = 0; // When the last click occurred
ESP8266WebServer server(80);
Adafruit_MPU6050 mpu;
// Debug flag
bool debug = true;
void setup() {
// Initialize serial communication
Serial.begin(115200);
delay(100); // Short delay for serial to initialize
Serial.println("\n\n=== Gesture Mouse Control System ===");
Serial.println("Initializing...");
// Initialize I2C for MPU6050
Wire.begin(D2, D1); // SDA=D2, SCL=D1
delay(50); // Give some time for I2C to initialize
// Initialize MPU6050
Serial.println("Connecting to MPU6050...");
bool mpuInitialized = false;
for (int i = 0; i < 5; i++) { // Try 5 times to initialize
if (mpu.begin()) {
mpuInitialized = true;
break;
}
Serial.println("Failed to find MPU6050 chip. Retrying...");
delay(500);
}
if (!mpuInitialized) {
Serial.println("ERROR: Could not connect to MPU6050 sensor!");
Serial.println("Please check your wiring and restart the device.");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found and Initialized Successfully!");
// Configure MPU6050 sensor settings
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
// Test reading from flex sensor
Serial.println("Testing flex sensor...");
int flexReading = analogRead(flexPin);
Serial.print("Flex sensor raw reading: ");
Serial.println(flexReading);
if (flexReading == 0 || flexReading > 1020) {
Serial.println("WARNING: Flex sensor reading seems invalid. Check your connections!");
} else {
Serial.println("Flex sensor reading looks good!");
}
// Connect to WiFi
WiFi.mode(WIFI_STA); // Set WiFi to station mode
WiFi.disconnect(); // Disconnect from any previous connections
delay(100);
Serial.print("Connecting to WiFi network: ");
Serial.println(ssid);
WiFi.begin(ssid, password);
// Wait for connection with timeout
int timeout = 0;
while (WiFi.status() != WL_CONNECTED && timeout < 20) {
delay(500);
Serial.print(".");
timeout++;
}
if (WiFi.status() != WL_CONNECTED) {
Serial.println("\nFAILED to connect to WiFi network!");
Serial.println("Please check your WiFi credentials and signal strength.");
Serial.println("The system will continue to function, but web server will not be available.");
} else {
Serial.println("");
Serial.print("Connected successfully to WiFi network: ");
Serial.println(ssid);
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
// Define server routes
server.on("/", HTTP_GET, handleRoot);
server.on("/data", HTTP_GET, handleData);
server.onNotFound(handleNotFound);
// Start server
server.begin();
Serial.println("HTTP server started on port 80");
Serial.println("You can access the data endpoint at: http://" + WiFi.localIP().toString() + "/data");
}
Serial.println("System initialization complete. Starting main loop...");
}
void loop() {
// Handle client requests if WiFi is connected
if (WiFi.status() == WL_CONNECTED) {
server.handleClient();
} else {
// If WiFi disconnected, try to reconnect occasionally
static unsigned long lastReconnectAttempt = 0;
unsigned long currentMillis = millis();
if (currentMillis - lastReconnectAttempt > 30000) { // Try every 30 seconds
lastReconnectAttempt = currentMillis;
if (WiFi.status() != WL_CONNECTED) {
Serial.println("WiFi disconnected. Attempting to reconnect...");
WiFi.reconnect();
}
}
}
// Always update the flex sensor state regardless of WiFi status
updateFlexSensorState();
// Small delay to prevent CPU hogging
delay(10);
}
// Custom map function for float values
float mapf(float x, float in_min, float in_max, float out_min, float out_max) {
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min;
}
void updateFlexSensorState() {
// Read the flex sensor
int ADCflex = analogRead(flexPin);
// Calculate voltage and resistance
float Vflex = ADCflex * VCC / 1023.0;
float Rflex = R_DIV * (VCC / Vflex - 1.0);
// Calculate the bend angle
float angle = mapf(Rflex, flatResistance, bendResistance, 0, 90.0);
// Constrain angle to avoid out-of-range values
angle = constrain(angle, 0, 90.0);
// Get current time
unsigned long currentTime = millis();
// Debug output (uncomment if needed)
static unsigned long lastDebugOutput = 0;
if (debug && (currentTime - lastDebugOutput > 1000)) {
lastDebugOutput = currentTime;
Serial.print("Flex Sensor - Raw: ");
Serial.print(ADCflex);
Serial.print(", Angle: ");
Serial.print(angle);
Serial.print(" degrees, Click state: ");
Serial.println(isClicked ? "TRUE" : "false");
}
// Check if angle is in the click range
if (angle >= CLICK_MIN_ANGLE && angle <= CLICK_MAX_ANGLE) {
// If not already clicked and enough time has passed since last click
if (!clickSent && (currentTime - lastClickTime > CLICK_COOLDOWN)) {
isClicked = true;
clickSent = true;
lastClickTime = currentTime;
Serial.println("CLICK EVENT DETECTED! Angle: " + String(angle));
}
} else {
// Reset click sent flag when no longer in click range
clickSent = false;
isClicked = false;
}
}
void handleRoot() {
String html = "<!DOCTYPE html>\n";
html += "<html>\n";
html += "<head>\n";
html += "<title>Gesture Mouse Control</title>\n";
html += "<meta http-equiv='refresh' content='5'>\n"; // Auto-refresh page every 5 seconds
html += "<style>\n";
html += "body { font-family: Arial, sans-serif; margin: 20px; background-color: #f0f0f0; }\n";
html += "h1 { color: #0066cc; }\n";
html += ".status { padding: 10px; background-color: #e0e0e0; border-radius: 5px; margin-top: 20px; }\n";
html += ".data { font-family: monospace; margin-top: 20px; }\n";
html += "</style>\n";
html += "</head>\n";
html += "<body>\n";
html += "<h1>Gesture Mouse Control System</h1>\n";
html += "<div class='status'>\n";
html += "<p>System Status: <strong>Running</strong></p>\n";
html += "<p>Server IP: <strong>" + WiFi.localIP().toString() + "</strong></p>\n";
html += "<p>Get sensor data at: <a href='/data'>/data</a> (JSON format)</p>\n";
html += "</div>\n";
// Get current sensor data
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
int ADCflex = analogRead(flexPin);
float Vflex = ADCflex * VCC / 1023.0;
float Rflex = R_DIV * (VCC / Vflex - 1.0);
float angle = mapf(Rflex, flatResistance, bendResistance, 0, 90.0);
angle = constrain(angle, 0, 90.0);
html += "<div class='data'>\n";
html += "<h2>Current Sensor Data:</h2>\n";
html += "<p>Accelerometer (m/s²):<br>\n";
html += "X: " + String(a.acceleration.x, 2) + "<br>\n";
html += "Y: " + String(a.acceleration.y, 2) + "<br>\n";
html += "Z: " + String(a.acceleration.z, 2) + "</p>\n";
html += "<p>Gyroscope (rad/s):<br>\n";
html += "X: " + String(g.gyro.x, 2) + "<br>\n";
html += "Y: " + String(g.gyro.y, 2) + "<br>\n";
html += "Z: " + String(g.gyro.z, 2) + "</p>\n";
html += "<p>Flex Sensor:<br>\n";
html += "Raw: " + String(ADCflex) + "<br>\n";
html += "Angle: " + String(angle, 2) + " degrees<br>\n";
html += "Click state: " + String(isClicked ? "TRUE" : "false") + "</p>\n";
html += "<p>Temperature: " + String(temp.temperature, 2) + " °C</p>\n";
html += "</div>\n";
html += "</body>\n";
html += "</html>\n";
server.send(200, "text/html", html);
}
void handleData() {
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
// Read the flex sensor for the JSON data
int ADCflex = analogRead(flexPin);
float Vflex = ADCflex * VCC / 1023.0;
float Rflex = R_DIV * (VCC / Vflex - 1.0);
float angle = mapf(Rflex, flatResistance, bendResistance, 0, 90.0);
angle = constrain(angle, 0, 90.0);
// Enable CORS headers
server.sendHeader("Access-Control-Allow-Origin", "*");
server.sendHeader("Access-Control-Allow-Methods", "GET");
server.sendHeader("Access-Control-Allow-Headers", "Content-Type");
// Create JSON response
String json = "{";
json += "\"accelerometer\": {";
json += "\"x\": " + String(a.acceleration.x) + ", ";
json += "\"y\": " + String(a.acceleration.y) + ", ";
json += "\"z\": " + String(a.acceleration.z);
json += "}, ";
json += "\"gyroscope\": {";
json += "\"x\": " + String(g.gyro.x) + ", ";
json += "\"y\": " + String(g.gyro.y) + ", ";
json += "\"z\": " + String(g.gyro.z);
json += "}, ";
json += "\"flex\": {";
json += "\"angle\": " + String(angle) + ", ";
json += "\"raw\": " + String(ADCflex) + ", ";
json += "\"click\": " + String(isClicked ? "true" : "false");
json += "}, ";
json += "\"temperature\": " + String(temp.temperature);
json += "}";
server.send(200, "application/json", json);
// Debug output
if (debug) {
Serial.println("Data endpoint accessed - Sent JSON response");
}
}
void handleNotFound() {
String message = "File Not Found\n\n";
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET) ? "GET" : "POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
for (uint8_t i = 0; i < server.args(); i++) {
message += " " + server.argName(i) + ": " + server.arg(i) + "\n";
}
server.send(404, "text/plain", message);
}Updating the Python Script:
- Modify the Python script with the updated code to ensure proper communication between the NodeMCU and the computer.
import requests
import json
import time
import numpy as np
import pyautogui
import math
from collections import deque
import tkinter as tk
from tkinter import ttk
import threading
import sys
from tkinter import messagebox
NODEMCU_IP = '192.168.31.212' # Replace with your NodeMCU IP
DATA_URL = f'http://{NODEMCU_IP}/data'
CONNECTION_TIMEOUT = 3
MAX_RETRIES = 5
MOUSE_SENSITIVITY_X = 10.0
MOUSE_SENSITIVITY_Y = 10.0
GYRO_THRESHOLD = 0.01 # Minimum gyro movement to register (eliminates jitter)
ACCELERATION_FACTOR = 2 # Exponential acceleration for faster movements
SCREEN_WIDTH, SCREEN_HEIGHT = pyautogui.size()
SMOOTHING_WINDOW = 5 # Number of samples for smoothing
# Movement modes
MODE_ABSOLUTE = "Absolute" # Direct mapping of tilt to screen position
MODE_RELATIVE = "Relative" # Tilt controls velocity, not position
MODE_HYBRID = "Hybrid" # A mix of both with auto-centering
# For safety (prevent mouse from going crazy)
pyautogui.FAILSAFE = True # Move mouse to corner to abort
# For UI
UPDATE_INTERVAL = 25 # milliseconds (faster updates)
# Global variables
is_paused = False
is_running = True
show_debug = True
baseline_accel = {"x": 0, "y": 0, "z": 0}
baseline_gyro = {"x": 0, "y": 0, "z": 0}
calibration_samples = 20
mouse_pos = {"x": pyautogui.position()[0], "y": pyautogui.position()[1]}
movement_mode = MODE_RELATIVE # Start with relative mode by default
# Flex sensor readings
flex_angle = 0
flex_raw = 0
# Debug variables
last_data_time = 0
fps_counter = 0
fps = 0
# Smoothing buffers
accel_history = {"x": deque(maxlen=SMOOTHING_WINDOW),
"y": deque(maxlen=SMOOTHING_WINDOW),
"z": deque(maxlen=SMOOTHING_WINDOW)}
gyro_history = {"x": deque(maxlen=SMOOTHING_WINDOW),
"y": deque(maxlen=SMOOTHING_WINDOW),
"z": deque(maxlen=SMOOTHING_WINDOW)}
# Create UI
root = tk.Tk()
root.title("Gesture Mouse Control")
root.geometry("700x580")
root.protocol("WM_DELETE_WINDOW", lambda: set_running(False))
# Style configuration for a more modern look
style = ttk.Style()
style.configure("TButton", padding=6, relief="flat", background="#ccc")
style.configure("TLabel", padding=2)
style.configure("TFrame", padding=5)
def set_running(state):
global is_running
is_running = state
if not state:
root.destroy()
sys.exit(0)
def toggle_pause():
global is_paused
is_paused = not is_paused
pause_btn.config(text="Resume" if is_paused else "Pause")
status_var.set("PAUSED" if is_paused else "RUNNING")
def toggle_debug():
global show_debug
show_debug = not show_debug
debug_btn.config(text="Hide Debug" if show_debug else "Show Debug")
if show_debug:
debug_frame.pack(fill=tk.X, expand=True, pady=5)
else:
debug_frame.pack_forget()
def change_movement_mode(mode):
global movement_mode
movement_mode = mode
status_var.set(f"Mode: {movement_mode}")
# Update radio buttons
mode_var.set(mode)
# Clear movement history when changing modes
for axis in ["x", "y", "z"]:
accel_history[axis].clear()
gyro_history[axis].clear()
def start_calibration():
global baseline_accel, baseline_gyro
status_var.set("Calibrating... Don't move the sensor!")
root.update()
# Reset baselines
baseline_accel = {"x": 0, "y": 0, "z": 0}
baseline_gyro = {"x": 0, "y": 0, "z": 0}
# Collect samples
accel_samples = {"x": [], "y": [], "z": []}
gyro_samples = {"x": [], "y": [], "z": []}
# Progress bar for calibration
progress = ttk.Progressbar(status_frame, length=200, mode="determinate")
progress.pack(pady=5)
for i in range(calibration_samples):
data = fetch_data()
if data:
for axis in ["x", "y", "z"]:
accel_samples[axis].append(data["accelerometer"][axis])
gyro_samples[axis].append(data["gyroscope"][axis])
# Update progress bar
progress["value"] = (i + 1) / calibration_samples * 100
root.update_idletasks()
time.sleep(0.1)
# Calculate averages
for axis in ["x", "y", "z"]:
if accel_samples[axis]: # Check if we got samples
baseline_accel[axis] = sum(accel_samples[axis]) / len(accel_samples[axis])
baseline_gyro[axis] = sum(gyro_samples[axis]) / len(gyro_samples[axis])
progress.destroy()
status_var.set("Calibration complete")
# Update settings display
sensitivity_x_var.set(MOUSE_SENSITIVITY_X)
sensitivity_y_var.set(MOUSE_SENSITIVITY_Y)
threshold_var.set(GYRO_THRESHOLD)
acceleration_var.set(ACCELERATION_FACTOR)
# Reset position to current mouse position
global mouse_pos
current_x, current_y = pyautogui.position()
mouse_pos = {"x": current_x, "y": current_y}
def update_sensitivity():
global MOUSE_SENSITIVITY_X, MOUSE_SENSITIVITY_Y, GYRO_THRESHOLD, ACCELERATION_FACTOR
try:
MOUSE_SENSITIVITY_X = float(sensitivity_x_var.get())
MOUSE_SENSITIVITY_Y = float(sensitivity_y_var.get())
GYRO_THRESHOLD = float(threshold_var.get())
ACCELERATION_FACTOR = float(acceleration_var.get())
status_var.set("Settings updated")
except ValueError:
messagebox.showerror("Invalid Input", "Please enter valid numbers for sensitivity values")
def fetch_data():
"""Fetch data from NodeMCU with retries"""
global fps_counter, last_data_time, fps
# Calculate FPS (Frames Per Second / Data updates per second)
current_time = time.time()
fps_counter += 1
if current_time - last_data_time >= 1.0:
fps = fps_counter
fps_counter = 0
last_data_time = current_time
for attempt in range(MAX_RETRIES):
try:
response = requests.get(DATA_URL, timeout=CONNECTION_TIMEOUT)
if response.status_code == 200:
connection_status_var.set(f"Connected ({fps} FPS)")
return json.loads(response.text)
else:
connection_status_var.set(f"Error: HTTP {response.status_code}")
time.sleep(0.5)
except requests.exceptions.RequestException as e:
connection_status_var.set(f"Connection error: {type(e).__name__}")
time.sleep(0.5)
return None
def smooth_data(data, history_buffer):
"""Apply smoothing to sensor data"""
history_buffer.append(data)
return sum(history_buffer) / len(history_buffer)
def apply_acceleration(value, threshold):
"""Apply non-linear acceleration to movements for better control"""
if abs(value) <= threshold:
return 0 # Filter out minor movements
# The further from threshold, the more acceleration applies
sign = 1 if value > 0 else -1
normalized = abs(value) - threshold
return sign * (normalized ** ACCELERATION_FACTOR)
def process_sensor_data(data):
"""Process sensor data and control mouse"""
global mouse_pos, flex_angle, flex_raw
if not data or is_paused:
return
# Get accelerometer and gyroscope data
accel = data["accelerometer"]
gyro = data["gyroscope"]
# Get flex sensor data if available
if "flex" in data:
flex_angle = data["flex"]["angle"]
flex_raw = data["flex"].get("raw", 0)
# Check if click is detected from NodeMCU
if data["flex"]["click"]:
pyautogui.click()
click_label.config(text="CLICK!")
root.after(500, lambda: click_label.config(text=""))
# Apply calibration
calibrated_accel = {
"x": accel["x"] - baseline_accel["x"],
"y": accel["y"] - baseline_accel["y"],
"z": accel["z"] - baseline_accel["z"]
}
calibrated_gyro = {
"x": gyro["x"] - baseline_gyro["x"],
"y": gyro["y"] - baseline_gyro["y"],
"z": gyro["z"] - baseline_gyro["z"]
}
# Apply smoothing to reduce jitter
for axis in ["x", "y", "z"]:
calibrated_accel[axis] = smooth_data(calibrated_accel[axis], accel_history[axis])
calibrated_gyro[axis] = smooth_data(calibrated_gyro[axis], gyro_history[axis])
# Calculate mouse movement based on the selected mode
dx, dy = 0, 0
if movement_mode == MODE_ABSOLUTE:
# Absolute mode: Map tilt angle directly to screen position
# This is similar to your original code
dx = -calibrated_gyro["y"] if abs(calibrated_gyro["y"]) > GYRO_THRESHOLD else 0
dy = calibrated_gyro["x"] if abs(calibrated_gyro["x"]) > GYRO_THRESHOLD else 0
# Scale the movement
dx = dx * (SCREEN_WIDTH / MOUSE_SENSITIVITY_X)
dy = dy * (SCREEN_HEIGHT / MOUSE_SENSITIVITY_Y)
# Update position
mouse_pos["x"] += dx
mouse_pos["y"] += dy
# When MODE_RELATIVE is selected, replace the existing relative mode implementation with this:
elif movement_mode == MODE_RELATIVE:
# Get current gyroscope values
gyro_x = calibrated_gyro["x"]
gyro_y = calibrated_gyro["y"]
# Initialize movement deltas
dx = 0
dy = 0
# Only process movement if above threshold to eliminate drift
# This is key to keeping cursor in place when sensor is in neutral position
if abs(gyro_y) > GYRO_THRESHOLD:
# Invert Y axis for natural movement direction
dx = -gyro_y
if abs(gyro_x) > GYRO_THRESHOLD:
dy = gyro_x
# Apply the requested amplification factor (200.0) to make movements more responsive
# This makes small tilts translate to meaningful cursor movement
amplification_factor = 200.0
# Apply amplification and sensitivity adjustments
if abs(dx) > 0:
dx_sign = 1 if dx > 0 else -1
dx = dx_sign * ((abs(dx) * amplification_factor) / MOUSE_SENSITIVITY_X)
if abs(dy) > 0:
dy_sign = 1 if dy > 0 else -1
dy = dy_sign * ((abs(dy) * amplification_factor) / MOUSE_SENSITIVITY_Y)
# Apply exponential scaling for larger movements
# This gives finer control for small movements while allowing fast traversal with larger tilts
if abs(dx) > 1.0:
dx = dx * (abs(dx) ** (ACCELERATION_FACTOR - 1.0))
if abs(dy) > 1.0:
dy = dy * (abs(dy) ** (ACCELERATION_FACTOR - 1.0))
# Get current actual mouse position
current_x, current_y = pyautogui.position()
# Update position with calculated movement
new_x = current_x + dx
new_y = current_y + dy
# Update stored mouse position
mouse_pos["x"] = new_x
mouse_pos["y"] = new_y
else:
# Normal movement when tilted
dx = dx * (12.0 / MOUSE_SENSITIVITY_X)
dy = dy * (12.0 / MOUSE_SENSITIVITY_Y)
current_x, current_y = pyautogui.position()
mouse_pos["x"] = current_x + dx
mouse_pos["y"] = current_y + dy
# Constrain to screen boundaries
mouse_pos["x"] = max(0, min(SCREEN_WIDTH - 1, mouse_pos["x"]))
mouse_pos["y"] = max(0, min(SCREEN_HEIGHT - 1, mouse_pos["y"]))
# Move the mouse
pyautogui.moveTo(mouse_pos["x"], mouse_pos["y"])
# Update UI
if show_debug:
accel_label.config(text=f"Accel: X: {calibrated_accel['x']:.2f}, Y: {calibrated_accel['y']:.2f}, Z: {calibrated_accel['z']:.2f}")
gyro_label.config(text=f"Gyro: X: {calibrated_gyro['x']:.2f}, Y: {calibrated_gyro['y']:.2f}, Z: {calibrated_gyro['z']:.2f}")
mouse_label.config(text=f"Mouse: X: {mouse_pos['x']:.0f}, Y: {mouse_pos['y']:.0f}, Mode: {movement_mode}")
flex_label.config(text=f"Flex Sensor: Angle: {flex_angle:.1f}° (Raw: {flex_raw})")
def update_ui():
"""Update UI and process data periodically"""
if is_running:
try:
data = fetch_data()
if data:
process_sensor_data(data)
except Exception as e:
error_msg = str(e)
if len(error_msg) > 50:
error_msg = error_msg[:50] + "..."
status_var.set(f"Error: {error_msg}")
finally:
root.after(UPDATE_INTERVAL, update_ui)
# Create UI elements
main_frame = ttk.Frame(root, padding="10")
main_frame.pack(fill=tk.BOTH, expand=True)
# Status frame
status_frame = ttk.LabelFrame(main_frame, text="Status")
status_frame.pack(fill=tk.X, expand=True, pady=5)
status_var = tk.StringVar(value=f"Mode: {movement_mode}")
status_label = ttk.Label(status_frame, textvariable=status_var, font=("Arial", 12, "bold"))
status_label.pack(pady=5)
connection_status_var = tk.StringVar(value="Initializing...")
connection_status_label = ttk.Label(status_frame, textvariable=connection_status_var)
connection_status_label.pack(pady=2)
click_label = ttk.Label(status_frame, text="", font=("Arial", 16, "bold"), foreground="red")
click_label.pack()
# Debug info
debug_frame = ttk.LabelFrame(main_frame, text="Sensor Data")
if show_debug:
debug_frame.pack(fill=tk.X, expand=True, pady=5)
accel_label = ttk.Label(debug_frame, text="Accel: X: 0.00, Y: 0.00, Z: 0.00")
accel_label.pack(anchor=tk.W)
gyro_label = ttk.Label(debug_frame, text="Gyro: X: 0.00, Y: 0.00, Z: 0.00")
gyro_label.pack(anchor=tk.W)
mouse_label = ttk.Label(debug_frame, text="Mouse: X: 0, Y: 0")
mouse_label.pack(anchor=tk.W)
flex_label = ttk.Label(debug_frame, text="Flex Sensor: Angle: 0.00° (Raw: 0)")
flex_label.pack(anchor=tk.W)
# Movement mode selection
mode_frame = ttk.LabelFrame(main_frame, text="Movement Mode")
mode_frame.pack(fill=tk.X, expand=True, pady=5)
mode_var = tk.StringVar(value=movement_mode)
mode_info = {
MODE_ABSOLUTE: "Tilt directly controls cursor position (return to neutral brings cursor to center)",
MODE_RELATIVE: "Tilt controls cursor movement speed (return to neutral stops cursor where it is)",
MODE_HYBRID: "Combines features of both modes for more natural control"
}
for idx, mode in enumerate([MODE_RELATIVE, MODE_ABSOLUTE, MODE_HYBRID]):
mode_radio = ttk.Radiobutton(
mode_frame,
text=mode,
variable=mode_var,
value=mode,
command=lambda m=mode: change_movement_mode(m)
)
mode_radio.grid(row=0, column=idx, padx=10, pady=5, sticky=tk.W)
# Add tooltip-like description
ttk.Label(mode_frame, text=mode_info[mode], font=("Arial", 8), foreground="gray").grid(
row=1, column=idx, padx=10, pady=(0, 5), sticky=tk.W
)
# Settings
settings_frame = ttk.LabelFrame(main_frame, text="Settings")
settings_frame.pack(fill=tk.X, expand=True, pady=5)
settings_grid = ttk.Frame(settings_frame)
settings_grid.pack(fill=tk.X, expand=True, padx=10, pady=5)
# X sensitivity
ttk.Label(settings_grid, text="X Sensitivity:").grid(row=0, column=0, sticky=tk.W, padx=5, pady=2)
sensitivity_x_var = tk.StringVar(value=str(MOUSE_SENSITIVITY_X))
sensitivity_x_entry = ttk.Entry(settings_grid, textvariable=sensitivity_x_var, width=8)
sensitivity_x_entry.grid(row=0, column=1, sticky=tk.W, padx=5, pady=2)
ttk.Label(settings_grid, text="(Lower = more sensitive)").grid(row=0, column=2, sticky=tk.W, padx=5, pady=2)
# Y sensitivity
ttk.Label(settings_grid, text="Y Sensitivity:").grid(row=1, column=0, sticky=tk.W, padx=5, pady=2)
sensitivity_y_var = tk.StringVar(value=str(MOUSE_SENSITIVITY_Y))
sensitivity_y_entry = ttk.Entry(settings_grid, textvariable=sensitivity_y_var, width=8)
sensitivity_y_entry.grid(row=1, column=1, sticky=tk.W, padx=5, pady=2)
ttk.Label(settings_grid, text="(Lower = more sensitive)").grid(row=1, column=2, sticky=tk.W, padx=5, pady=2)
# Gyro threshold
ttk.Label(settings_grid, text="Gyro Threshold:").grid(row=0, column=3, sticky=tk.W, padx=5, pady=2)
threshold_var = tk.StringVar(value=str(GYRO_THRESHOLD))
threshold_entry = ttk.Entry(settings_grid, textvariable=threshold_var, width=8)
threshold_entry.grid(row=0, column=4, sticky=tk.W, padx=5, pady=2)
ttk.Label(settings_grid, text="(Deadzone)").grid(row=0, column=5, sticky=tk.W, padx=5, pady=2)
# Acceleration factor
ttk.Label(settings_grid, text="Accel Factor:").grid(row=1, column=3, sticky=tk.W, padx=5, pady=2)
acceleration_var = tk.StringVar(value=str(ACCELERATION_FACTOR))
acceleration_entry = ttk.Entry(settings_grid, textvariable=acceleration_var, width=8)
acceleration_entry.grid(row=1, column=4, sticky=tk.W, padx=5, pady=2)
ttk.Label(settings_grid, text="(Higher = more acceleration)").grid(row=1, column=5, sticky=tk.W, padx=5, pady=2)
# Apply button
ttk.Button(settings_frame, text="Apply Settings", command=update_sensitivity).pack(pady=5)
# Control buttons
buttons_frame = ttk.Frame(main_frame)
buttons_frame.pack(fill=tk.X, expand=True, pady=10)
calibrate_btn = ttk.Button(buttons_frame, text="Calibrate", command=start_calibration)
calibrate_btn.pack(side=tk.LEFT, padx=5)
pause_btn = ttk.Button(buttons_frame, text="Pause", command=toggle_pause)
pause_btn.pack(side=tk.LEFT, padx=5)
debug_btn = ttk.Button(buttons_frame, text="Hide Debug" if show_debug else "Show Debug", command=toggle_debug)
debug_btn.pack(side=tk.LEFT, padx=5)
ttk.Button(buttons_frame, text="Exit", command=lambda: set_running(False)).pack(side=tk.RIGHT, padx=5)
# Connection info frame
conn_frame = ttk.LabelFrame(main_frame, text="Connection")
conn_frame.pack(fill=tk.X, expand=True, pady=5)
conn_frame_content = ttk.Frame(conn_frame)
conn_frame_content.pack(fill=tk.X, expand=True, pady=5)
ttk.Label(conn_frame_content, text="NodeMCU IP:").grid(row=0, column=0, sticky=tk.W, padx=5)
ip_var = tk.StringVar(value=NODEMCU_IP)
ip_entry = ttk.Entry(conn_frame_content, textvariable=ip_var, width=15)
ip_entry.grid(row=0, column=1, sticky=tk.W, padx=5)
def update_ip():
global NODEMCU_IP, DATA_URL
NODEMCU_IP = ip_var.get().strip()
DATA_URL = f'http://{NODEMCU_IP}/data'
connection_status_var.set(f"Connecting to {NODEMCU_IP}...")
# Clear data history when changing connection
for axis in ["x", "y", "z"]:
accel_history[axis].clear()
gyro_history[axis].clear()
ttk.Button(conn_frame_content, text="Update IP", command=update_ip).grid(row=0, column=2, padx=5)
ttk.Label(conn_frame_content, text="URL:").grid(row=1, column=0, sticky=tk.W, padx=5)
ttk.Label(conn_frame_content, text=DATA_URL).grid(row=1, column=1, columnspan=2, sticky=tk.W, padx=5)
# Keyboard shortcuts info
shortcuts_frame = ttk.LabelFrame(main_frame, text="Keyboard Shortcuts")
shortcuts_frame.pack(fill=tk.X, expand=True, pady=5)
shortcuts = """
• ESC: Emergency stop (move mouse to top-left corner)
• SPACE: Toggle pause/resume (when window is focused)
• C: Recalibrate sensor
• 1/2/3: Switch movement modes
"""
ttk.Label(shortcuts_frame, text=shortcuts, justify=tk.LEFT).pack(anchor=tk.W, pady=5)
# Bind keyboard shortcuts
def handle_key(event):
if event.keysym == "space":
toggle_pause()
elif event.keysym == "c":
start_calibration()
elif event.keysym == "1":
change_movement_mode(MODE_RELATIVE)
elif event.keysym == "2":
change_movement_mode(MODE_ABSOLUTE)
elif event.keysym == "3":
change_movement_mode(MODE_HYBRID)
elif event.keysym == "Escape":
# Emergency stop - move to corner to trigger failsafe
pyautogui.moveTo(0, 0)
# Debug message to confirm key press was detected
print(f"Key pressed: {event.keysym}")
root.bind_all("<Key>", handle_key)
# Function to force focus for keyboard events
def ensure_focus(event=None):
root.focus_set()
print("Focus set to main window")
# Bind focus event to main window and all child frames
root.bind("<FocusIn>", ensure_focus)
main_frame.bind("<Button-1>", ensure_focus)
# Call focus explicitly at startup
root.after(1500, ensure_focus) # Set focus after a short delay
# Start the data processing
def initialize():
global mouse_pos
# Get current mouse position at start
current_x, current_y = pyautogui.position()
mouse_pos = {"x": current_x, "y": current_y}
root.after(1000, lambda: root.focus_force())
# Start updating UI after a short delay
root.after(1000, update_ui)
connection_status_var.set(f"Connecting to {NODEMCU_IP}...")
# Show a welcome message
messagebox.showinfo(
"Gesture Mouse Control",
"Welcome to Gesture Mouse Control!\n\n"
"• The default 'Relative' mode lets you control cursor speed with tilt angle\n"
"• Click 'Calibrate' while holding the sensor in neutral position\n"
"• Use the flex sensor for clicking\n"
"• Adjust sensitivity settings if movement is too fast or slow\n\n"
"Press OK to start"
)
if __name__ == "__main__":
try:
initialize()
root.mainloop()
except Exception as e:
print(f"Critical Error: {e}")
sys.exit(1)The idea here is that when you bend the flex sensor, its resistance changes, and the Node MCU can detect that change through the A0 pin. In our Python code (running on the computer, not the Node MCU), we’ll use that data to trigger a right-click. Oh, and in the demo, you’ll see me tilt the breadboard to move the cursor (thanks to the MPU 6050) and then bend the flex sensor to do a right-click.
Step 7: Upgrading to a PCB for a Pro-Level SetupIn this step, we will securely mount all the components onto a PCB board to ensure a durable and professional finish.
Choosing the Right PCBI am using a dotted PCB board for this project, but if you prefer a more professional approach or are not confident working with a dotted PCB, I have designed a custom PCB and attached the Gerber file for you to use.
Cutting the PCB to the Right Size- Take a dotted PCB board and cut it to the following dimensions:
- Width: 35mm
- Height: 85mm
- Start by soldering a female header onto the PCB board. This will allow easy mounting and removal of the NodeMCU.
- Follow the circuit diagram carefully to solder all connections. Ensure that each joint is properly secured to avoid loose connections.
- After soldering, thoroughly inspect the board for any loose or shorted connections.
- Once you have verified the connections, carefully mount the NodeMCU and the flex sensor onto the PCB.
- Make sure all components are firmly in place and aligned properly.
- If you want to use an external power supply, you can provide an input voltage between 5V to 12V.
- In my setup, I am using 7.4V by connecting two 18650 batteries in series.
- Ensure that your power source is properly connected and regulated to avoid damage to the components.
The final code was uploaded to the NodeMCU in Step 5, so there is no need to upload any additional code in this step. Simply power up the setup and test the functionality!
Gerber File Download Link:https://drive.google.com/file/d/1wxJ67QVmuhwCd1HaCLQD3AkOZFCOEaZA/view?usp=drive_link
Step 8: Working Video and TutorialCongratulations! You’ve successfully built your Gesture Control Mouse using Node MCU, MPU 6050 AND Flex Sensor. Demonstration video of this project can be viewed here: Watch Now
Thank you for your interest in this project. If you have any questions or suggestions for future projects, please leave a comment and I will do my best to assist you.
For business or promotional inquiries, please contact me via email at Email.
I will continue to update this article with new information. Don’t forget to follow me for updates on new projects and subscribe to my YouTube channel (YouTube: roboattic Lab) for more content. Thank you for your support.







{kind=link}
Comments