I have three goldfish, and time to time, more and more, I accidentally forget to feed them. I noticed they stopped growing, and began to be concerned. I decided, with a great Arduino at my hands, that I could create an automated feeder that would do the job for me. And due to the fact that the nearest electronic store is a couple of hours away, I had little kit. So I needed to work with what I had, meaning the project had to be simple.
In a day or two of hard work, prototyping and testing, the fish-tastic solution was completed.
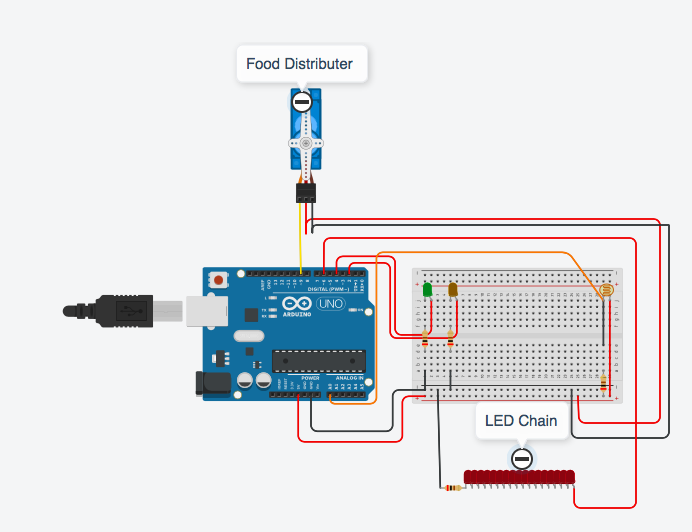
Very easily can one change the time between the feeding hours and how much is fed, and it doesn't feed at night. There is also a LED Chain that wraps around the tank that turns on in day, and dims at night.
Unfortunately, the wall behind the fish tank was very slippery, so I couldn't really stick anything firm to it. So the things are dangling from there, very sensitive. But without human contact, the contraption works fine feeding my scaly sidekicks!
A Sketch Of Fish Eating Food From The PGFF!


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)














{kind=link}
Comments